1 つのリージョンでの 2 つのアベイラビリティーゾーンの展開
このドキュメントでは、アーキテクチャ、構成、このデプロイメント モードを有効にする方法、このモードでのレプリカの使用方法など、1 つのリージョン内の 2 つのアベイラビリティ ゾーン (AZ) のデプロイメント モードを紹介します。
このドキュメントの「リージョン」という用語は地理的エリアを指しますが、大文字の「リージョン」は TiKV のデータstorageの基本単位を指します。 「AZ」はリージョン内の孤立した場所を指し、各リージョンには複数の AZ があります。このドキュメントで説明されているソリューションは、複数のデータ センターが 1 つの都市にあるシナリオにも当てはまります。
導入
TiDB は通常、高可用性と災害復旧機能を確保するためにマルチ AZ 展開ソリューションを採用しています。マルチ AZ デプロイメント ソリューションには、1 つのリージョンに複数の AZ、2 つのリージョンに複数の AZ など、複数のデプロイメント モードが含まれています。このドキュメントでは、1 つのリージョンに 2 つの AZ のデプロイメント モードを紹介します。このモードで導入すると、TiDB は低コストで高可用性と災害復旧の要件を満たすこともできます。この展開ソリューションは、データ レプリケーション自動同期モード、つまり DR 自動同期モードを採用しています。
1 つのリージョンに 2 つの AZ があるモードでは、2 つの AZ の距離は 50 キロメートル未満です。これらは通常、同じリージョンまたは 2 つの隣接するリージョンにあります。 2 つの AZ 間のネットワークレイテンシーは1.5 ミリ秒未満で、帯域幅は 10 Gbps を超えています。
導入アーキテクチャ
このセクションでは、2 つのアベイラビリティ ゾーン AZ1 と AZ2 がそれぞれ東と西に配置されているリージョンを例に挙げます。 AZ1 はプライマリ AZ、AZ2 はディザスター リカバリー (DR) AZ です。
クラスター展開のアーキテクチャは次のとおりです。
- クラスターには 6 つのレプリカがあります。AZ1 には 3 つの投票者レプリカ、AZ2 には 2 つの投票者レプリカと 1 つのLearnerレプリカです。 TiKVコンポーネントの場合、各ラックには適切なラベルが付いています。
- Raftプロトコルは、ユーザーにとって透過的なデータの一貫性と高可用性を確保するために採用されています。
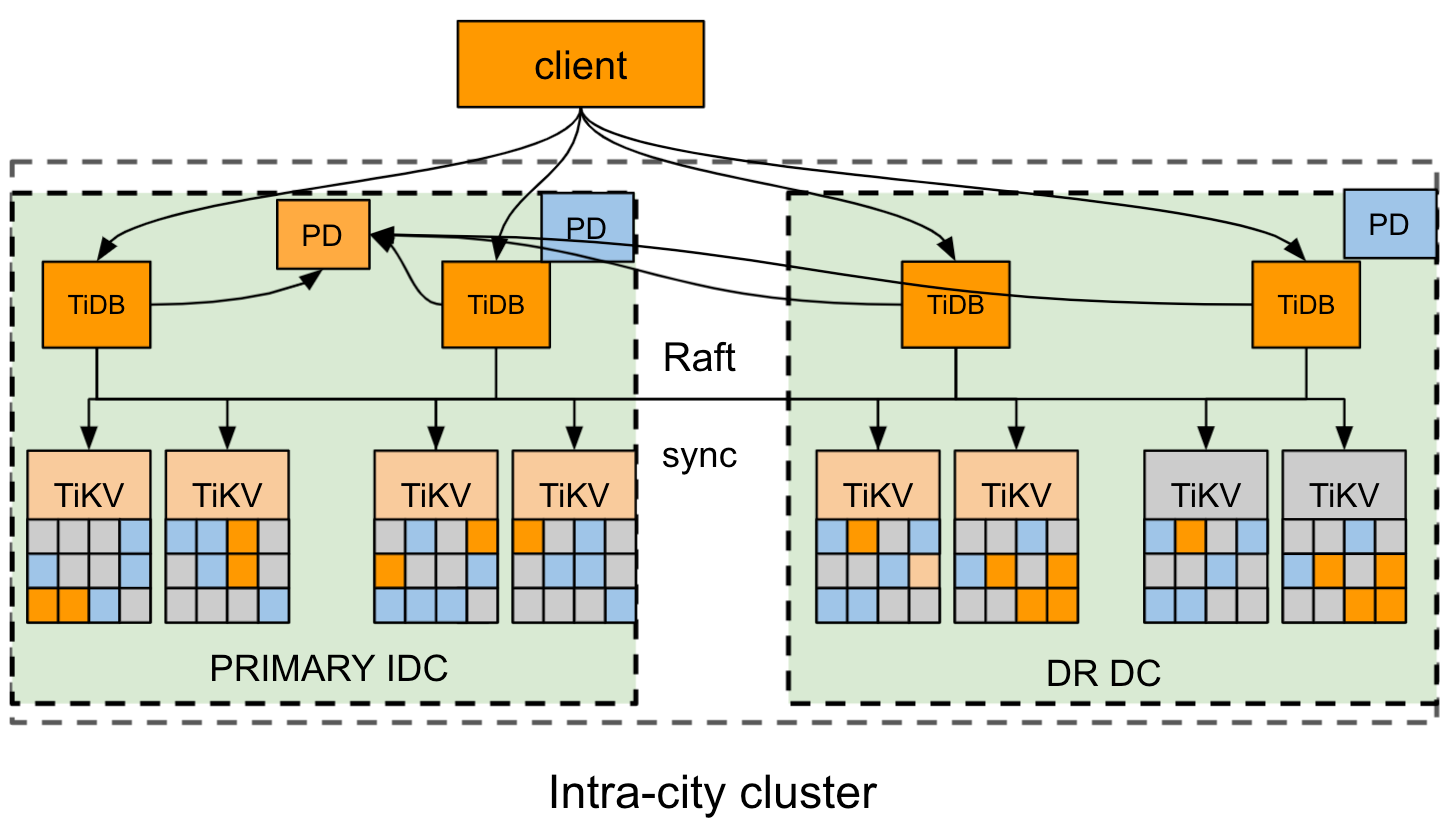
この導入ソリューションでは、クラスターのレプリケーション ステータスを制御および識別するための 3 つのステータスを定義し、TiKV のレプリケーション モードを制限します。クラスターのレプリケーション モードは、3 つのステータス間を自動的かつ適応的に切り替えることができます。詳細はステータススイッチ章を参照してください。
- sync : 同期レプリケーション モード。このモードでは、ディザスター リカバリー AZ 内の少なくとも 1 つのレプリカがプライマリ AZ と同期します。 Raftアルゴリズムにより、各ログがラベルに基づいて確実に DR に複製されます。
- async : 非同期レプリケーション モード。このモードでは、ディザスター リカバリー AZ はプライマリ AZ と完全には同期しません。 Raftアルゴリズムは、多数決プロトコルに従ってログを複製します。
- sync-recover : 同期リカバリモード。このモードでは、ディザスター リカバリー AZ はプライマリ AZ と完全には同期しません。 Raft は徐々にラベル複製モードに切り替え、ラベル情報を PD に報告します。
コンフィグレーション
例
次のtiup topology.yamlファイル例は、1 つのリージョン展開モードにおける 2 つのアベイラビリティ ゾーンの一般的なトポロジ構成です。
# # Global variables are applied to all deployments and used as the default value of
# # the deployments if a specific deployment value is missing.
global:
user: "tidb"
ssh_port: 22
deploy_dir: "/data/tidb_cluster/tidb-deploy"
data_dir: "/data/tidb_cluster/tidb-data"
server_configs:
pd:
replication.location-labels: ["az","rack","host"]
pd_servers:
- host: 10.63.10.10
name: "pd-10"
- host: 10.63.10.11
name: "pd-11"
- host: 10.63.10.12
name: "pd-12"
tidb_servers:
- host: 10.63.10.10
- host: 10.63.10.11
- host: 10.63.10.12
tikv_servers:
- host: 10.63.10.30
config:
server.labels: { az: "east", rack: "east-1", host: "30" }
- host: 10.63.10.31
config:
server.labels: { az: "east", rack: "east-2", host: "31" }
- host: 10.63.10.32
config:
server.labels: { az: "east", rack: "east-3", host: "32" }
- host: 10.63.10.33
config:
server.labels: { az: "west", rack: "west-1", host: "33" }
- host: 10.63.10.34
config:
server.labels: { az: "west", rack: "west-2", host: "34" }
- host: 10.63.10.35
config:
server.labels: { az: "west", rack: "west-3", host: "35" }
monitoring_servers:
- host: 10.63.10.60
grafana_servers:
- host: 10.63.10.60
alertmanager_servers:
- host: 10.63.10.60
配置ルール
計画されたトポロジに基づいてクラスターをデプロイするには、 配置ルールを使用してクラスターのレプリカの場所を決定する必要があります。例として 4 つのレプリカの展開 (2 つの投票者レプリカがプライマリ AZ にあり、1 つの投票者レプリカと 1 つのLearnerレプリカがディザスター リカバリー AZ にあります) を例にとると、配置ルールを使用してレプリカを次のように構成できます。
cat rule.json
[
{
"group_id": "pd",
"group_index": 0,
"group_override": false,
"rules": [
{
"group_id": "pd",
"id": "az-east",
"start_key": "",
"end_key": "",
"role": "voter",
"count": 3,
"label_constraints": [
{
"key": "az",
"op": "in",
"values": [
"east"
]
}
],
"location_labels": [
"az",
"rack",
"host"
]
},
{
"group_id": "pd",
"id": "az-west-1",
"start_key": "",
"end_key": "",
"role": "follower",
"count": 2,
"label_constraints": [
{
"key": "az",
"op": "in",
"values": [
"west"
]
}
],
"location_labels": [
"az",
"rack",
"host"
]
},
{
"group_id": "pd",
"id": "az-west-2",
"start_key": "",
"end_key": "",
"role": "learner",
"count": 1,
"label_constraints": [
{
"key": "az",
"op": "in",
"values": [
"west"
]
}
],
"location_labels": [
"az",
"rack",
"host"
]
}
]
}
]
rule.jsonの構成を使用するには、次のコマンドを実行して既存の構成をdefault.jsonファイルにバックアップし、既存の構成をrule.jsonで上書きします。
pd-ctl config placement-rules rule-bundle load --out="default.json"
pd-ctl config placement-rules rule-bundle save --in="rule.json"
以前の構成にロールバックする必要がある場合は、バックアップ ファイルdefault.jsonを復元するか、次の JSON ファイルを手動で書き込み、現在の構成をこの JSON ファイルで上書きします。
cat default.json
[
{
"group_id": "pd",
"group_index": 0,
"group_override": false,
"rules": [
{
"group_id": "pd",
"id": "default",
"start_key": "",
"end_key": "",
"role": "voter",
"count": 5
}
]
}
]
DR 自動同期モードを有効にする
レプリケーション モードは PD によって制御されます。次のいずれかの方法を使用して、PD 構成ファイルでレプリケーション モードを構成できます。
方法 1: PD 構成ファイルを構成し、クラスターをデプロイします。
[replication-mode] replication-mode = "dr-auto-sync" [replication-mode.dr-auto-sync] label-key = "az" primary = "east" dr = "west" primary-replicas = 3 dr-replicas = 2 wait-store-timeout = "1m"方法 2: クラスターを展開している場合は、pd-ctl コマンドを使用して PD の構成を変更します。
config set replication-mode dr-auto-sync config set replication-mode dr-auto-sync label-key az config set replication-mode dr-auto-sync primary east config set replication-mode dr-auto-sync dr west config set replication-mode dr-auto-sync primary-replicas 3 config set replication-mode dr-auto-sync dr-replicas 2
設定項目の説明:
replication-modeは、有効にするレプリケーション モードです。前の例では、dr-auto-syncに設定されています。デフォルトでは、多数決プロトコルが使用されます。label-keyは異なる AZ を区別するために使用され、配置ルールと一致する必要があります。この例では、プライマリ AZ は「east」、ディザスタ リカバリ AZ は「west」です。primary-replicasは、プライマリ AZ 内の Voter レプリカの数です。dr-replicasは、ディザスタ リカバリ AZ 内の Voter レプリカの数です。wait-store-timeout、ネットワークの分離または障害が発生したときに非同期レプリケーション モードに切り替えるまでの待ち時間です。ネットワーク障害の時間が待機時間を超えると、非同期レプリケーション モードが有効になります。デフォルトの待機時間は 60 秒です。
クラスターの現在のレプリケーション ステータスを確認するには、次の API を使用します。
curl http://pd_ip:pd_port/pd/api/v1/replication_mode/status
{
"mode": "dr-auto-sync",
"dr-auto-sync": {
"label-key": "az",
"state": "sync"
}
}
ステータススイッチ
クラスターのレプリケーション モードは、次の 3 つのステータスを自動的かつ適応的に切り替えることができます。
- クラスターが正常な場合、同期レプリケーション モードが有効になり、ディザスター リカバリー AZ のデータ整合性が最大化されます。
- 2 つの AZ 間のネットワーク接続に障害が発生するか、ディザスタ リカバリ AZ が故障すると、事前に設定された保護期間の後、クラスターは非同期レプリケーション モードを有効にしてアプリケーションの可用性を確保します。
- ネットワークが再接続されるか、ディザスタ リカバリ AZ が回復すると、TiKV ノードは再びクラスターに参加し、データを段階的にレプリケートします。最後に、クラスターは同期レプリケーション モードに切り替わります。
ステータススイッチの詳細は次のとおりです。
初期化: 初期化段階では、クラスターは同期レプリケーション モードになっています。 PD はステータス情報を TiKV に送信し、すべての TiKV ノードは同期レプリケーション モードに従って動作します。
同期から非同期に切り替える: PD は TiKV のハートビート情報を定期的にチェックして、TiKV ノードに障害が発生したか、切断されているかを判断します。障害ノードの数がプライマリ AZ (
primary-replicas) とディザスター リカバリー AZ (dr-replicas) のレプリカ数を超えると、同期レプリケーション モードではデータ レプリケーションを実行できなくなり、ステータスを切り替える必要があります。障害または切断時間がwait-store-timeoutで設定された時間を超えると、PD はクラスターのステータスを非同期モードに切り替えます。次に、PD は非同期のステータスをすべての TiKV ノードに送信し、TiKV のレプリケーション モードが 2 つのアベイラビリティ ゾーン レプリケーションからネイティブRaftマジョリティに切り替わります。非同期から同期への切り替え: PD は定期的に TiKV のハートビート情報をチェックし、TiKV ノードが再接続されているかどうかを判断します。障害が発生したノードの数がプライマリ AZ (
primary-replicas) およびディザスター リカバリー AZ (dr-replicas) のレプリカ数よりも少ない場合は、同期レプリケーション モードを再度有効にすることができます。 PD はまずクラスターのステータスを同期回復に切り替え、ステータス情報をすべての TiKV ノードに送信します。 TiKV のすべてのリージョンは、2 つのアベイラビリティ ゾーンの同期レプリケーション モードに徐々に切り替わり、ハートビート情報を PD に報告します。 PD は TiKV リージョンのステータスを記録し、復旧の進行状況を計算します。すべての TiKV リージョンの切り替えが完了すると、PD はレプリケーション モードを同期に切り替えます。
災害からの回復
このセクションでは、1 つのリージョンに 2 つの AZ を展開する災害復旧ソリューションを紹介します。
同期レプリケーション モードでクラスターに障害が発生した場合、 RPO = 0でデータ復旧を実行できます。
プライマリ AZ に障害が発生し、Voter レプリカの大部分が失われた場合でも、完全なデータがディザスター リカバリー AZ に存在する場合、失われたデータはディザスター リカバリー AZ から復元できます。現時点では、専門ツールを使用した手動介入が必要です。 支持を得ます回復ソリューションについては、PingCAP またはコミュニティから入手できます。
ディザスター リカバリー AZ が失敗し、いくつかの Voter レプリカが失われた場合、クラスターは自動的に非同期レプリケーション モードに切り替わります。
同期レプリケーション モードではないクラスターに障害が発生し、 RPO = 0でデータ復旧を実行できない場合:
- Voter レプリカの大部分が失われた場合は、専門ツールを使用して手動で介入する必要があります。 支持を得ます回復ソリューションについては、PingCAP またはコミュニティから入手できます。